

手術(shù)機器人不是只有“達芬奇”聽說過“hinotori”和“ROSA”嗎?
手術(shù)輔助機器人“達芬奇”,許多了解醫(yī)療知識的人已經(jīng)都很熟悉了。它是一個高級機器人外科手術(shù)系統(tǒng),通過使用微創(chuàng)的方法,實施復(fù)雜的外科手術(shù)。雖然叫機器人,但它是由醫(yī)生完全控制的!機器人只是一個手術(shù)輔助系統(tǒng),不可能在沒有醫(yī)生參與下進行任何活動。
大家可在日本就醫(yī)網(wǎng)官網(wǎng)或公眾號搜索“達芬奇”進行詳細了解,這里就不贅述了。今天是要告訴大家,手術(shù)機器人可不是只有“達芬奇”。還有“火鳥”和“羅莎”。
“hinotori™”火鳥
“hinotori™”是日本Medicaroid株式會社開發(fā)的日本首款實用型內(nèi)鏡手術(shù)輔助機器人。它具有連接手術(shù)器械和內(nèi)窺鏡的四個手臂,醫(yī)生可以在遠離患者身體的操控臺中檢查內(nèi)窺鏡的3D圖像并遠程操作手臂,進行精準(zhǔn)的手術(shù)。
2021年9月,藤田醫(yī)科大學(xué)醫(yī)院在腎臟和泌尿外科領(lǐng)域開始臨床應(yīng)用。2022年10月,在胃腸外科領(lǐng)域開展胃癌切除術(shù)。這是世界上第一個在泌尿外科領(lǐng)域之外使用 “hinotori™”的手術(shù)。

(圖)2022年10月使用hinotori™進行胃癌切除術(shù)。外科醫(yī)生、麻醉師、護士和臨床技師等多學(xué)科醫(yī)務(wù)人員通力合作。 外科醫(yī)生坐在離手術(shù)臺不遠的操控臺上,遠程操作手臂。

日本Medicaroid公司成立于2013年,是日本川崎重工業(yè)有限公司和Sysmex公司的合資企業(yè)。它于2015年開始開發(fā)日本國內(nèi)生產(chǎn)的手術(shù)機器人,并于2020年12月推出hinotori™。
“hinotori™”這個名字取自漫畫家兼醫(yī)生的手冢治蟲的漫畫《火鳥》。基于“服務(wù)和支持人類”的機器人概念,“hinotori™”標(biāo)志還采用了“火鳥”設(shè)計。

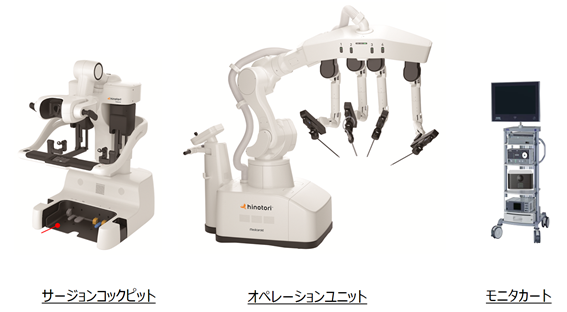
和“達芬奇”相似,“hinotori™”由3個部分組成:外科醫(yī)生控制臺、床旁機械臂系統(tǒng)、成像系統(tǒng)。
執(zhí)行手術(shù)操作的手臂具有類似于人類手腕關(guān)節(jié)的設(shè)計。
醫(yī)生控制臺采用人體工程學(xué)設(shè)計,以適應(yīng)外科醫(yī)生的姿勢。它減輕了外科醫(yī)生的身體負擔(dān)并支持無壓力手術(shù)。
成像系統(tǒng)在控制臺內(nèi)以3D形式投射高清內(nèi)窺鏡圖像,旨在支持外科醫(yī)生和助理醫(yī)生之間的順暢溝通。
目前藤田醫(yī)科大學(xué)擁有“hinotori™”3臺。
“hinotori” 和“達芬奇”有什么區(qū)別?
日本腹腔鏡手術(shù)的先驅(qū),1997年實施日本第一例腹腔鏡全胃摘除手術(shù)。2012年兼任達芬奇微創(chuàng)手術(shù)中心主任,是眾所周知的倡導(dǎo)機器人手術(shù)的領(lǐng)導(dǎo)者。
宇山一郎教授如此評論:
兩者的基本結(jié)構(gòu)是相同的,即醫(yī)生在遠離病人床邊的箱形控制臺確認內(nèi)窺鏡的三維圖像時,遠程移動連接有手術(shù)器械的手臂。
平時我們一直把這些機器叫做“機器人、機器人”的,它的正式名稱是"內(nèi)窺鏡手術(shù)支持設(shè)備"。顧名思義,它不協(xié)助開腹手術(shù),只是協(xié)助內(nèi)窺鏡手術(shù),如腹腔鏡和胸腔鏡,是微創(chuàng)手術(shù),因此對病人來說更加溫和。為了便于從外部進入,器械的尺寸比直接用手插入時要長。在緊張或做細微動作時,手的顫抖程度會變大。而“達芬奇”正是為了彌補目前內(nèi)窺鏡手術(shù)的固有缺陷而設(shè)計的設(shè)備,它不會顫抖。hinotori的設(shè)計理念也是一樣的。
如果我們把他們倆比作一輛車,區(qū)別肯就是就在于乘客對進口車和國產(chǎn)車的偏好,但只要他們能舒適地到達目的地,選擇哪一種并不重要。在能夠準(zhǔn)確安全地進行手術(shù)方面,達芬奇和hinotori之間沒有本質(zhì)區(qū)別。
“ROSA”:骨科手術(shù)機器人系統(tǒng)“羅莎”
ROSA (Robot of Stereotactic Assistant,ROSA)系統(tǒng)是2007年由法國Medtech公司研發(fā)的用于神經(jīng)外科和骨科手術(shù)的手術(shù)輔助機器人。特別是ROSA Knee系統(tǒng)集成了全膝關(guān)節(jié)置換手術(shù)程序,配備了各種功能,可以更準(zhǔn)確地支持外科醫(yī)生的手術(shù),例如調(diào)整軟組織的平衡和確定股骨的旋轉(zhuǎn)。為了使人工關(guān)節(jié)像原始人體關(guān)節(jié)一樣自然移動,重要的是人工關(guān)節(jié)放置在適當(dāng)?shù)奈恢谩H欢踩胛锏姆胖迷诤艽蟪潭壬先Q于外科醫(yī)生的經(jīng)驗,包括截骨的量和角度。ROSA由機器人引導(dǎo)保證準(zhǔn)確性,無論醫(yī)生技術(shù)水平如何,都可以獲得良好的手術(shù)效果。
2019年,藤田醫(yī)科大學(xué)醫(yī)院為實現(xiàn)更安全、更安心的全膝關(guān)節(jié)置換術(shù),在日本首次引進了骨科手術(shù)輔助機器人“ROSA Knee System ”。通過使用“ROSA”協(xié)助全膝關(guān)節(jié)置換術(shù)中的骨切除和定位植入物,以實現(xiàn)手術(shù)微創(chuàng)化并降低并發(fā)癥風(fēng)險。
“ROSA”有三個特點:
1.機器人手臂被引導(dǎo)到適當(dāng)?shù)那泄俏恢茫蛇M行準(zhǔn)確定位。
2.可通過數(shù)據(jù)分析糾正手術(shù)計劃中的誤差,使手術(shù)更安全、更有保障。
3.機器人手臂可以進行微調(diào),如植入物的位置,骨切除的角度。
外科醫(yī)生可以根據(jù)數(shù)據(jù)以類似于正常手術(shù)的方式進行手術(shù),無論技術(shù)水平如何,都可以期待良好的手術(shù)效果。
藤田醫(yī)科大學(xué)病院使用“ROSA”進行的“人工膝關(guān)節(jié)置換術(shù)”已經(jīng)超過350例。目前,ROSA已經(jīng)被納入了“人工股骨頭置換術(shù)”。

ROSA Knee 系統(tǒng)

使用ROSA的骨切除手術(shù)